



Le robot sphérique japonais SORA-Q, de la taille d'une balle de tennis, a réussi sa mission sur la Lune. Déployé en janvier 2024 par l'atterrisseur SLIM, il s'est transformé et a navigué de manière autonome, prouvant que de minuscules robots, inspirés par la technologie des jouets, sont une voie viable pour l'exploration spatiale future. Il a transmis des images cruciales avant la fin de sa courte mission.
 C'est un pari technologique qui vient d'être validé. En janvier 2024, l'agence spatiale japonaise (JAXA) a déposé sur la surface lunaire un engin hors du commun via son atterrisseur SLIM : SORA-Q. Ce rover de seulement 8 centimètres, pesant moins de 230 grammes, a démontré une capacité stupéfiante de navigation autonome dans un environnement hostile. Sa mission : prouver qu'un format ultra-compact peut accomplir des tâches complexes, une approche qui pourrait redéfinir les futures missions planétaires.
C'est un pari technologique qui vient d'être validé. En janvier 2024, l'agence spatiale japonaise (JAXA) a déposé sur la surface lunaire un engin hors du commun via son atterrisseur SLIM : SORA-Q. Ce rover de seulement 8 centimètres, pesant moins de 230 grammes, a démontré une capacité stupéfiante de navigation autonome dans un environnement hostile. Sa mission : prouver qu'un format ultra-compact peut accomplir des tâches complexes, une approche qui pourrait redéfinir les futures missions planétaires.Comment un robot si petit peut-il fonctionner sur la Lune ?
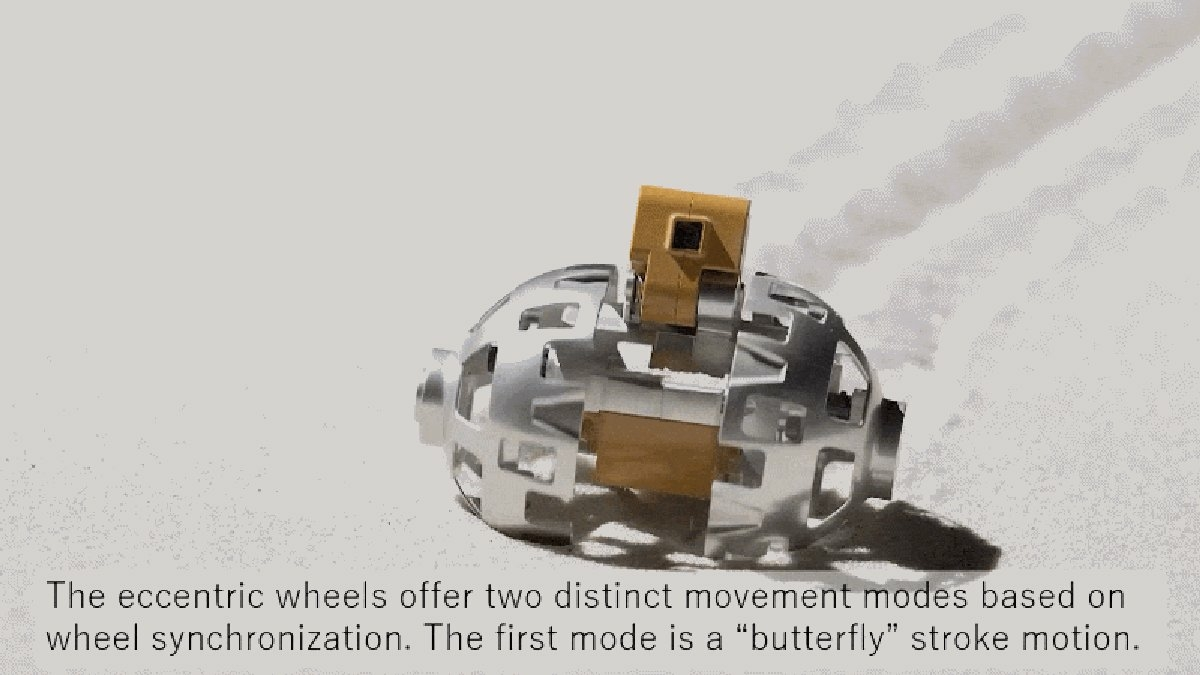
Le secret de SORA-Q réside dans une alliance improbable entre l'exploration spatiale et l'industrie du jouet. Développé conjointement par la JAXA, Sony, l'Université Doshisha et surtout Takara-TOMY, le co-détenteur de la marque Transformers, le rover emprunte directement ses astuces aux jouets de notre enfance. Son ingénieux mécanisme de transformation lui permet de passer d'une sphère compacte à un véhicule à deux roues.
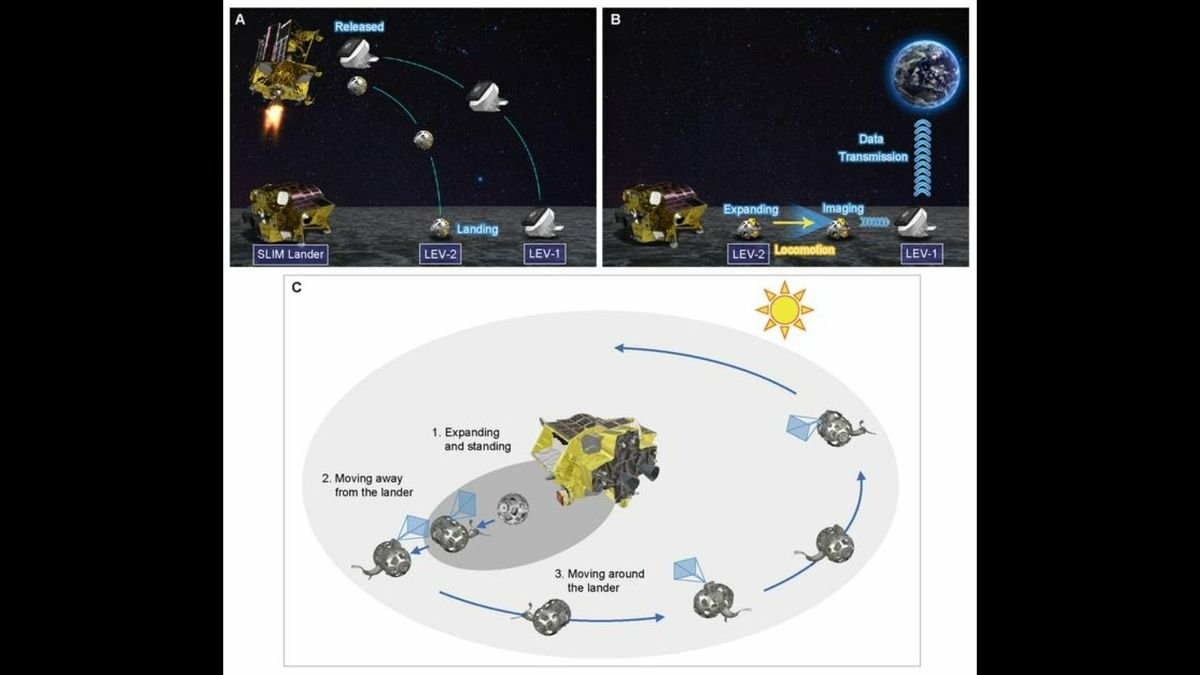
 Une fois déployé, les deux hémisphères de la sphère deviennent ses roues. Simultanément, une caméra se redresse et une petite queue se déploie pour assurer sa stabilité. C'est ce design qui lui a permis de se déplacer autour de l'atterrisseur SLIM et de capturer des images en couleur du site et du paysage lunaire environnant, près du cratère Shioli. Une véritable prouesse de miniaturisation.
Une fois déployé, les deux hémisphères de la sphère deviennent ses roues. Simultanément, une caméra se redresse et une petite queue se déploie pour assurer sa stabilité. C'est ce design qui lui a permis de se déplacer autour de l'atterrisseur SLIM et de capturer des images en couleur du site et du paysage lunaire environnant, près du cratère Shioli. Une véritable prouesse de miniaturisation.Pourquoi développer un robot lunaire miniature ?
L'avantage stratégique est double : le coût et l'accès. Un robot lunaire de cette taille réduit drastiquement la masse de la charge utile et donc les frais de lancement. Mais surtout, sa petite taille lui ouvre des terrains inaccessibles aux gros rovers, comme les crevasses ou les environnements très accidentés. L'agence japonaise JAXA parie sur des systèmes distribués pour surmonter les limitations individuelles.
 En effet, SORA-Q (désigné LEV-2) n'était pas seul. Il fonctionnait en tandem avec un autre petit robot, LEV-1, une machine "sauteuse". SORA-Q explorait et collectait les données, tandis que LEV-1 servait de relais de communication pour transmettre ces informations vers la Terre. Cette approche d'essaims de robots, où chaque unité a une fonction spécialisée, est une piste très sérieuse pour les futures explorations.
En effet, SORA-Q (désigné LEV-2) n'était pas seul. Il fonctionnait en tandem avec un autre petit robot, LEV-1, une machine "sauteuse". SORA-Q explorait et collectait les données, tandis que LEV-1 servait de relais de communication pour transmettre ces informations vers la Terre. Cette approche d'essaims de robots, où chaque unité a une fonction spécialisée, est une piste très sérieuse pour les futures explorations.La mission a-t-elle été un succès total ?
Presque. La communication avec les deux rovers a cessé après une centaine de minutes, soit un peu plus tôt que prévu. Les équipes au sol estiment que le problème vient probablement de LEV-1, dont la batterie se serait épuisée ou qui aurait subi un dommage lié à son mode de déplacement par sauts. Sans son relais, SORA-Q est devenu silencieux.
 Loin d'être un échec, cet arrêt prématuré est une mine d'informations. Il met en lumière la fragilité des systèmes en tandem et fournit des leçons cruciales pour la prochaine génération de missions d'exploration spatiale. Chaque minute de fonctionnement a permis de valider un concept audacieux : oui, un minuscule robot inspiré d'un jouet peut explorer la Lune de manière autonome.
Loin d'être un échec, cet arrêt prématuré est une mine d'informations. Il met en lumière la fragilité des systèmes en tandem et fournit des leçons cruciales pour la prochaine génération de missions d'exploration spatiale. Chaque minute de fonctionnement a permis de valider un concept audacieux : oui, un minuscule robot inspiré d'un jouet peut explorer la Lune de manière autonome.Foire Aux Questions (FAQ)
Qu'est-ce que SORA-Q ?
SORA-Q, aussi connu sous le nom de LEV-2, est un rover lunaire sphérique et transformable de 8 cm de diamètre, développé par le Japon. Il a été déployé sur la Lune en janvier 2024 dans le cadre de la mission SLIM.
Qui a conçu ce robot ?
SORA-Q est le fruit d'une collaboration entre l'agence spatiale japonaise (JAXA), Sony, l'Université Doshisha et le fabricant de jouets Takara-TOMY, célèbre pour la franchise Transformers.
Quel est l'avenir pour cette technologie ?
Les leçons apprises avec SORA-Q serviront à concevoir de futurs systèmes robotiques distribués, ou "essaims", pour l'exploration de surfaces planétaires complexes, en misant sur des robots plus petits, moins chers et plus agiles.
merci à GNT
